

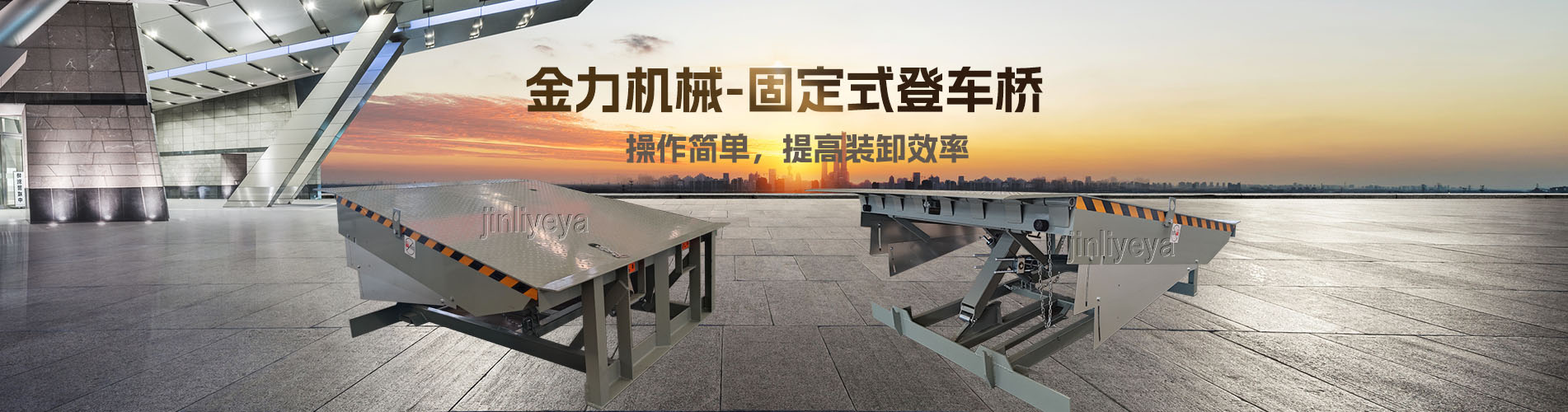
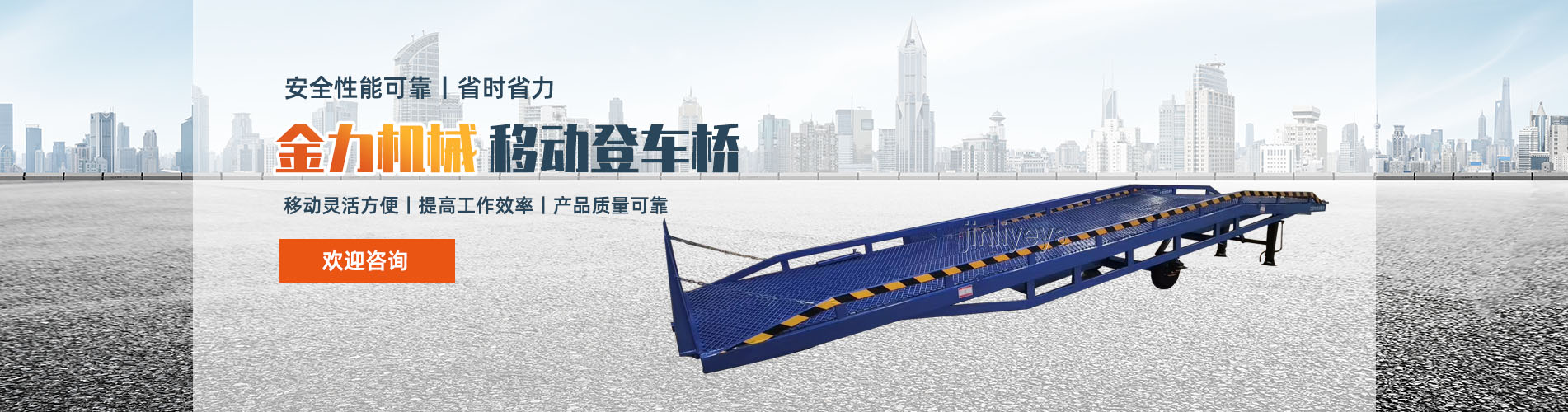













自行式液壓升降平台的主要特點是:使用人員可以不用下(xià)升降台(tái)就可控製機械升降(jiàng)、行走,可在台麵上控製設備行駛到其他的工作(zuò)地點。設備自身具有行走及轉向驅動功能,不需人工牽引,不需外接電源。移動靈(líng)活方便,令高空作業更方便快捷,是現代企業高效安全生產(chǎn)之理想高(gāo)空作業設備。3、安全器動作(zuò)時,設在安全器上的安全開關應將電動機電路斷開,製動器製動。
直流(liú)電動驅動輪具有自鎖功能,驅動輪工作時(shí)刹車分離,全自行電動升(shēng)降平台定做,不工作時自動鎖定。自行式升(shēng)降(jiàng)平台有以下幾部分組成:
1、剪叉(chā)式主體結構和伸縮(suō)工作台、以及安全護欄。
2、自動行(háng)走(zǒu)直流電動驅(qū)動(dòng)輪。
3、液壓(yā)係統:泵站、油缸等。
4、直流(liú)電源、充(chōng)電器。
5、電動控製箱和操作箱。


濟南www.17c.com液壓機械有限公司是一家從事機械設備製造、銷售、安裝資(zī)質齊全的規(guī)範(fàn)化企業,企業主導產品有非標(biāo)定(dìng)製液壓升(shēng)降平台、液壓登車橋、大噸位升降平台、綠籬修(xiū)剪機等機械設備。升降機選購注意事項1:升(shēng)降(jiàng)機這幾年因為被國家列出機械特種設備,生產廠(chǎng)家資質要求越來越低,從而五花八(bā)門的廠家越來越多。公司不斷研(yán)發創新產品,不(bú)斷拓展國內外市場。依靠自主創新,不斷研發新產(chǎn)品,專於為(wéi)用戶量身設計製造,公(gōng)司真誠歡迎各(gè)界人士前來(lái)參觀洽談。
隨著中國經濟(jì)飛速的發展,城市(shì)化進程的日新月異,高空作業平台開始被中國人(rén)所認識,並開始廣泛的應用(yòng)在電力、市政園林、通信、機場車站、造船、廣告、酒店商場等高空施工的領域,高空作業平台有著廣闊的發展前景。剪叉式升降(jiàng)平台用途以及自身特點剪叉式高空作業平台具有較好的穩定性及較(jiào)高的承載(zǎi)力,這與其特(tè)有的剪叉式結構是分不開的,此外其還具有噪聲(shēng)小、行程大和安(ān)裝空間小等(děng)諸多優點。目前,無腳手(shǒu)架施工的高(gāo)空作業設備的大量使用不僅可以大大提高施工的速度(dù)和效(xiào)率,還有效降低了工人們的勞動強度,極大地保障了高(gāo)空作業人員的人身安全。
作為高空機械行業的新型基礎性設施設備,自行式高空升降作業平台的結構(gòu)形式和安全(quán)特性越來越(yuè)受(shòu)到人們(men)的重視,那麽自行式高空(kōng)作業平台到底安全嗎?
基於現有的高空升降(jiàng)作業平(píng)台的設計原理,結合相(xiàng)關設計(jì)參數及大量參考文獻,全自行電動升降平台廠家(jiā),設計出自行式高空作業平台的整體構(gòu)造組成(chéng)形(xíng)式,合肥全自行電動升降平台,並結合高空作(zuò)業平台(tái)的相關標準以及實際的工作情(qíng)況, 釆用力矩(jǔ)平衡法建(jiàn)立高空作業平台抗傾覆穩定性數學模型,確定了(le)其兩類典型的危險工況,得(dé)出了危險工況下的自行式高空作業平台(tái)受到的載荷情況;應用(yòng)有限元的(de)分析方法,全自行電動升降平台價格,在不影晌其分析結(jié)果的(de)前提(tí)條件下對自行式高空作業平台模型進行適當的簡化,並利用ANSYS軟件提供的(de)APDL (ANSYS Parametric Design Language)語言對高空作業平台進行參數(shù)化建模,對其在兩種危險工況下整機的結構強度及剛度進行了改進

安全(quán)區的定義,因為高空(kōng)作業車有廣泛的行動,必須對安全區進行嚴格的定義。 準(zhǔn)確計算安全區域非常重要。3:選擇的(de)供貨廠家,首要條件是需要看生產廠家的信譽,再就是售後服務能力。 要收集的數(shù)據包括主臂的長度、主臂的仰角和(hé)轉台的水平角(jiǎo)度。全自行電(diàn)動(dòng)升降平台 針對數據采(cǎi)集量大、處理能(néng)力大、邏輯關係複雜的問(wèn)題 EPEC控製器通用模塊是為移動設備(bèi)控製係統設計的一種(zhǒng)緊湊型(xíng)多功能嵌入式控製模塊。 該模塊提(tí)供了一個開放的輸入/輸出接口(kǒu),可以連(lián)接傳(chuán)感器、手柄、執行(háng)器和大多數製(zhì)造商生產的其(qí)他設備。它具有高分辨(biàn)率和(hé)分辨率(lǜ)、良好的(de)實時性能以及控製器之間的(de)良好分工。 這輛車使用3個EPEC控製器。轉台和底盤控(kòng)製器主要負責轉台操作機構和車輛運動執行機構的數據處理(lǐ)。
工作杆控製器主要負責登(dēng)船操(cāo)作機構和工作杆操(cāo)作的數據處(chù)理 然後通過CANBUS總線,實現(xiàn)了工作杆(gǎn)控製器、轉台控製器和底盤(pán)控(kòng)製器的數據資源共享和動作互(hù)鎖 計算高空作業(yè)車的安(ān)全區域全自行電(diàn)動升降(jiàng)平台



 在線客服
在線客服 15665709458
15665709458 1574931819@qq.com
1574931819@qq.com


